
Support for ROS Development
Developed based on the ROS framework, offering a complete open-source code solution with RVIZ visualization modeling support. The system enables users to build simulation environments autonomously, flexibly configure operational paths, and fully implement core functional modules, including SLAM mapping, autonomous navigation, dynamic obstacle avoidance, and global path planning.

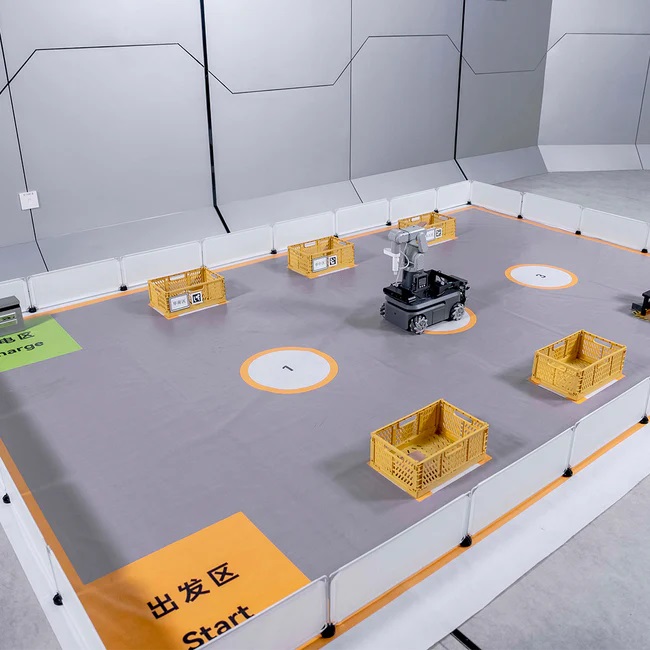
Automated Smart Logistics Sandbox System
Adopting a modular design, this system allows for rapidly constructing a sorting and transportation training platform in just 10 minutes. Developed explicitly for university laboratories, it is optimized for small spaces and integrates core functional modules such as SLAM mapping, autonomous navigation and obstacle avoidance, AI vision-based sorting, and infrared automatic recharging.
 Standardized Educational Course Support
Standardized Educational Course Support
The kit integrates ROS development, sensor technology, and real-world industry scenarios to build a comprehensive, practical knowledge system that offers a college-level intelligent logistics training course.
The supporting resources include:
- Lecture Slides
- Lecture Notes
- Practical Guides
- Instructional Videos
They support open-source debugging and visual teaching. Through 10 experimental cases combining simulation and reality (covering SLAM mapping, path planning, etc.), cultivate the capabilities of system design and engineering implementation.

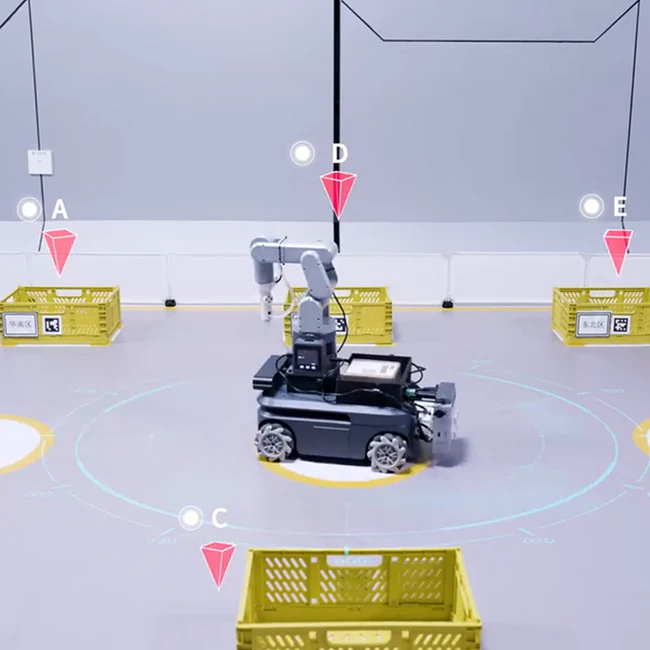
One-Click Start, and the Visual Teaching Scene Can Be Deployed Instantly
The kit includes an intelligent logistics task management system software, featuring an intuitive visual UI design and supporting one-click start functionality for seamless operation. It integrates a visual camera perspective to monitor the real-time logistics process. The visual function area includes OCR text detection, ARUCO code detection, and QR code detection to ensure efficient information recognition and processing. The motion control function area supports PS2 joystick and keyboard control, providing flexible operation methods.

Product Package
| Name |
myAGV Compound Robot Intelligent Logistics Kit |
| Hardware Equipment |
| myAGV Jetson Nano Mobile Chassis x 1 |
| mechArm 270 M5Stack Robot Arm x 1 |
| myCobot Camera Flange x 1 |
| myCobot Vertical Suction Pump x 1 |
| Spare Battery for myAGV x 1 |
| Astra Pro 2 3D Camera for myAGV x 1 |
| PS2 Bluetooth Controller x 1 |
| Charging Kit x 1 |
| Sand Table Materials x 1 |
|
| Course Resources |
| ①Lecture Slides |
| ②Lecture Notes |
| ③Practical Guides |
| ④Instructional Videos |
|
Product Parameters
| myAGV Jetson Nano |
| Motor: Planetary Brushless DC Motor |
| Wheels: Mecanum Wheels |
| myCobot Camera Flange x 1 |
| Payload: 5 KG |
| Weight: 4.16 KG |
| LiDAR Scanning Range: 0.12-8M |
| LiDAR Angle: 360° |
| Built-in Camera: 8 Megapixels |
| Shooting Angle: 77° |
| Focal Length: 2.96 mm |
| Standby Time: 328 minutes |
| Battery Life: 181 minutes |
| Max Speed: 0.9 m/s |
| Power Supply: 12.6V, 2A |
| Operating Temperature: -5°C to 45°C |
|
| mechArm 270 M5Stack |
| Degrees of Freedom: 6 |
| Repeatability: ±0.5 mm |
| Payload: 250g |
| Weight: 1 kg |
| Working Radius: 270 mm |
| Charging Voltage: 8~12V 5A |
| Motor Type: High Precision Magnetic Encoder Motor × 6 |
| Max Speed: 120°/s |
| Control: M5Stack Basic |
| Communication: USB / Type-C |
|
| myCobot 2D Camera Flange for mechArm |
| Supported Systems: Win7/8/10, Linux, MAC |
| Material: ABS Injection Molding |
| Environmental Requirements: Normal temperature and pressure |
| Dimensions: 83 × 33 × 16 mm |
| Lifespan: 2 years |
| Weight: 60g |
| Mounting Method: LEGO Connector |
| USB Protocol: USB 2.0 HS/FS |
| Lens Focal Length: Standard 1.7mm |
| Field of View: Approximately 60° |
|
| Astra Pro 2 3D Camera for myAGV |
| Model: A20113-000 |
| Working Distance: 0.6m – 6m |
| Dimensions: 164.85 × 36.00 × 40 mm |
| Weight: 145g ±5 |
| Power Consumption: Average power < 2.0W, peak power < 2.5W |
| Baseline: 55mm |
| Interface: USB Type A Male |
| Power Supply: USB 2.0 |
| Recommended Power Supply: 5V 0.5A |
| Operating Temperature: 10°C – 40°C |
| Measurement Accuracy: 3mm @ 1m |
| Resolution @ Frame Rate: “Depth Image: 1280×1024 @ 7fps, 1280×960 @ 7fps, 640×480 @ 10/15/30fps, 320×240 @ 10/15/30fps, 160×120 @ 10/15/30fps” “Color Image: 1280×960 @ 7fps, 640×480 @ 10/15/30fps, 320×240 @ 10/15/30fps” |
| Depth FOV: H58.4° V45.5° D70° ±5° |
| Depth Format: Y16/Y12/Y11 |
| Color FOV: H62.7° V49.0° D75.1° ±5.0° |
| Image Format: UYVY |
| Operating System: Windows/Linux |
| Suitable for: Indoor environments |
| Safety: Class 1 Laser |
| Camera Principle: Monocular Structured Light |
| Certification: RoHS 2.0/REACH/Class 1 |
|
| myCobot Vertical Suction Pump for mechArm |
| Lifespan: 1 year |
| Material: ABS Injection Molding |
| Mounting Method: LEGO Connector |
| Dimensions: “Suction Pump Box: 72 × 52 × 37 mm”, “Suction Pump End: 63 × 24.5 × 26.7 mm” |
| Control Interface: IO Control |
| Environmental Requirements: Normal temperature and pressure |
| Number of Suction Cups: 1 |
| Suction Cup Size: Diameter 20mm |
| Suction Weight: Rated 180g |
| Power Supply Device: Suction Pump Box |
|
| Spare Battery for myAGV |
| Capacity: 6400mAh |
| Voltage: 11.1V |
|
| myAGV Compound Robot Intelligent Logistics Kit Map |
| Dimensions: 350 × 225 cm |
| Material: Printed Cloth |
| Waterproof: Yes |
|
Only logged in customers who have purchased this product may leave a review.
Shipping Policy
Fast Delivery! We ship via USPS, UPS, DHL, or FedEx because they're fast, reliable, and easy to track. We process orders within 24 hours, and delivery may take 4-7 working days, depending on your location. We'll email you the tracking info once we ship your order. We sell in USD.
Shipping Costs: For some products, we calculate shipping costs by weight rather than quantity. To reduce shipping costs for orders with multiple items, please contact us before placing your order.
Tariff: To minimize or avoid high tariffs, we ship from the country where the product is made, such as China, Italy, Taiwan, Canada, or Europe. If applicable, you will pay the tariff in your country before delivery. The total amount of your order does not include a tariff.
Ships From: On this product page, check the Ships From: label to see which country the product ships from. We do not ship all of our products from the USA, except for products made in the USA or in stock. We ship most products from regions such as China, Italy, Taiwan, and Europe, as well as other countries. Therefore, the tariff depends on the country of origin, as not all countries charge the same rate. For example, if the US imposes a 30% tariff on goods from China, in contrast, other countries may impose a lower tariff or none at all.
Tariff vs. Shipping Fee: Please don't confuse the shipping fee with the tariff, because they are two separate charges. You pay us a shipping fee for the carrier to deliver your order to your door. You pay the tariff to the customs office, a branch of your government, as an import tax.
Why aren't we adding tariffs to the product's retail price? If all countries imposed the same tariff amount and used the same currency, we would have added that tariff to the product's retail price. Our suppliers and we are not responsible for tariffs. Please shop accordingly.
Attention! We'll email you the tracking number so you can follow your parcel. The shipping company will contact you by phone, text, or email to arrange payment of the tariff on their website. As the customer, you're responsible for responding to their calls, texts, or emails. You can also use the tracking number link we emailed you to contact the shipping company or pay any applicable tariffs online, if you haven't already done so.
Heads Up! We're not responsible if the shipping company returns your parcel to the country of origin due to the unpaid tariff or non-compliance with its requirements. As a result, you will be responsible for the reshipping costs, applicable tariffs, and an additional 20% service fee. We will not accept any excuses for failing to follow up with the shipping company regarding the tariff, and we will not issue a refund.
Please check your SPAM folder! To provide you with delivery information, we will add your email address to the shipping website so you receive delivery notifications until your parcel reaches your shipping address. Please always check your spam folder to ensure you receive emails from Oz Robotics, USPS, UPS, DHL, and FedEx. Please let us know if you don't want us to enter your email on the shipping company website.
Return Policy
5 Hours: If a mistake occurs during purchase, you have 5 hours to request a refund for any reason, including if you don't want to pay the tariff. However, Stripe will not refund you its processing fee if you cancel your order; therefore, we cannot refund it.
All Sales Are Final: After 5 hours, we can't cancel your order with a refund because order cancellations incur multiple transaction processing fees from Stripe and PayPal, additional shipping fees, reverse tariff payments, and paid ads, all of which are costly and time-consuming. For technical issues, we'll assist you in resolving problems and provide a replacement if you can prove that the product has a manufacturing defect.
Exchange Policy: We want you to be happy with your new purchase. However, once you have used the product, we can't issue a refund, but we will offer an exchange for a product with irreversible manufacturing defects or technical issues. If you purchased the wrong product, then you will be responsible for the re-shipping fees and tariffs. If the product is defective, please email us ASAP with photos or a video of the faulty part so we can evaluate the issue before arranging a replacement.
Privacy Policy
Oz Robotics does not collect personal data from customers or visitors; it collects only the data shown on the user profile screen for registered users.
Terms and Conditions
Delivery Date/Time: If the shipping company can't deliver your parcel because you weren't at your delivery address on the scheduled date/time, that is not our fault. If the carrier returned your parcel to the manufacturer from the country where it was shipped, that is outside our control. Therefore, you will be responsible for paying the re-shipping cost and any applicable tariff for any re-shipment request. In such a case, we will not issue a refund.
Warranty: We cover problems caused by manufacturing defects, not those resulting from faulty repair attempts, misuse, or customer accidents.








Reviews
There are no reviews yet.