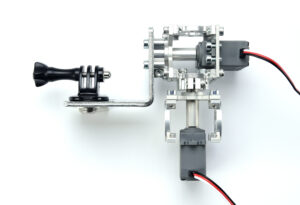
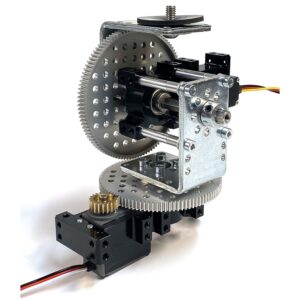
High Torque AC Servo Integrated Frameless Inner Rotor Torque Harmonic Actuator HAS-11
Standard rotary actuators typically integrate a frameless inner-rotor torque motor, a harmonic drive, and an absolute encoder to form a complete rotary actuator unit. The control component (drive unit) typically uses an external configuration to enable high-precision motion control of the connected equipment. These actuators are commonly used in applications requiring high precision and space efficiency, such as machine-tool rotary tables, precision medical equipment, 5-axis laser-cutting systems, and semiconductor manufacturing equipment.

Features
- High Torque Output: The motor delivers high torque at low speeds to meet equipment load requirements, achieving low-speed/high-torque performance.
- Compact Integrated Design: Frameless torque motors eliminate housings and bearings, embedding directly into the actuator to minimize footprint.
- Precision Control Capability: High-resolution built-in encoders enable micron-level positioning and soft landing functionality, ideal for: Precision rotary tables, Semiconductor die bonding
- Low-Inertia Response: Lightweight rotor and low-friction structural designs enhance dynamic response speed and reduce motion lag.
Specifications
| Product Parameters(AC-220V) |
| Model |
|
11 |
14 |
17 |
20 |
25 |
32 |
40 |
50 |
58 |
| Reduction Ratio |
/ |
51 |
101 |
51 |
81 |
101 |
51 |
81 |
101 |
121 |
51 |
81 |
101 |
121 |
161 |
51 |
81 |
101 |
121 |
161 |
51 |
81 |
101 |
121 |
161 |
51 |
81 |
101 |
121 |
161 |
51 |
101 |
51 |
101 |
| Rated Torque |
N·M |
4 |
8 |
8.6 |
13.5 |
13.5 |
27 |
33 |
49 |
49 |
30 |
48 |
58 |
61 |
61 |
68.5 |
107 |
133 |
133 |
133 |
133 |
206 |
264 |
267 |
267 |
242 |
351 |
460 |
557 |
557 |
642 |
823 |
951 |
1200 |
| Peak Torque |
N·M |
8.3 |
11 |
23 |
29 |
34 |
43 |
53 |
66 |
66 |
69 |
91 |
102 |
108 |
113 |
121 |
169 |
194 |
207 |
217 |
267 |
376 |
411 |
436 |
459 |
497 |
641 |
702 |
762 |
800 |
1163 |
1211 |
1828 |
1964 |
| Rated Speed |
RPM |
69 |
35 |
59 |
37 |
30 |
59 |
37 |
30 |
25 |
59 |
37 |
30 |
25 |
19 |
49 |
31 |
25 |
21 |
16 |
45 |
28 |
23 |
19 |
14 |
39 |
25 |
20 |
17 |
12 |
27 |
22 |
27 |
22 |
| Max Speed |
RPM |
102 |
51 |
118 |
74 |
59 |
118 |
74 |
59 |
50 |
118 |
74 |
59 |
50 |
37 |
94 |
59 |
48 |
40 |
30 |
90 |
57 |
49 |
38 |
29 |
80 |
51 |
41 |
34 |
25 |
37 |
30 |
37 |
30 |
| Rated Current |
A |
0.98 |
0.99 |
0.78 |
0.77 |
0.62 |
2.36 |
1.82 |
2.17 |
1.81 |
2.63 |
2.65 |
2.56 |
2.25 |
1.69 |
3.90 |
3.84 |
3.83 |
3.20 |
2.40 |
5.82 |
5.68 |
5.83 |
4.93 |
3.7 |
8.72 |
7.97 |
8.37 |
8.46 |
6.36 |
11.94 |
12.27 |
17.68 |
17.89 |
| Max Current |
A |
2.03 |
1.36 |
2.09 |
1.66 |
1.56 |
3.68 |
2.92 |
2.92 |
2.44 |
6.04 |
5.02 |
4.51 |
3.98 |
3.13 |
6.90 |
6.07 |
5.58 |
4.97 |
3.92 |
11.69 |
10.36 |
9.08 |
8.04 |
6.36 |
17.91 |
14.55 |
12.75 |
11.58 |
9.13 |
21.62 |
18.06 |
33.99 |
29.29 |
| Torque Constant |
N·M/Arms |
4.08 |
8.08 |
11.02 |
17.50 |
21.82 |
11.42 |
18.14 |
22.62 |
27.10 |
11.42 |
18.14 |
22.62 |
27.10 |
36.06 |
17.54 |
27.86 |
34.74 |
41.62 |
55.38 |
22.85 |
36.29 |
45.25 |
54.21 |
72.13 |
27.74 |
44.06 |
54.94 |
65.82 |
87.58 |
53.78 |
67.06 |
53.784 |
67.064 |
| Unidirectional Positioning Accuracy |
Arcsec |
≤90 |
≤90 |
≤70 |
≤60 |
≤60 |
≤60 |
≤60 |
≤50 |
≤50 |
≤60 |
≤60 |
≤60 |
≤50 |
≤50 |
≤60 |
≤50 |
≤50 |
≤40 |
≤40 |
≤60 |
≤50 |
≤50 |
≤40 |
≤40 |
≤60 |
≤50 |
≤50 |
≤40 |
≤40 |
≤30 |
≤30 |
≤30 |
≤30 |
| Repeat Positioning Accuracy |
Arcsec |
≤20 |
≤20 |
≤15 |
≤10 |
≤10 |
≤15 |
≤10 |
≤10 |
≤10 |
≤10 |
≤10 |
≤10 |
≤10 |
≤10 |
≤10 |
≤10 |
≤10 |
≤10 |
≤10 |
≤10 |
≤10 |
≤10 |
≤10 |
≤10 |
≤10 |
≤10 |
≤10 |
≤10 |
≤10 |
≤10 |
≤10 |
≤10 |
≤10 |
| Tilt Stiffness |
X104N.m/rad |
4 |
8 |
15 |
24 |
38 |
95 |
175 |
Rated radial load 2750N
Rated axial load 2750N
Rated overturning moment 1950 N ·M |
Rated radial load 3200N
Rated axial load 3200N
Rated overturning moment 2500 N ·M |
| Torsional Stiffness |
X104N.m/rad |
0.3 |
0.34 |
0.46 |
0.6 |
1.07 |
1.3 |
1.8 |
2.3 |
3.4 |
4.6 |
7.6 |
9.9 |
14 |
18.6 |
| Motor Phase Resistance |
Ohma(20°C) |
12 |
7.5 |
2.6 |
2.6 |
3.55 |
0.88 |
0.8 |
0.126 |
0.126 |
| Motor Phase Inductance |
Mh |
9.5 |
11.5 |
6.7 |
6.7 |
10 |
6.1 |
8 |
0.65 |
0.65 |
| Back-EMF Constant |
Vrms/Krpm |
10.5 |
25 |
25 |
25 |
40 |
40 |
44 |
52 |
52 |
| Rotor Inertia |
Without brake KG*m2 |
8.32*10^-6 |
3.6*10^-5 |
7.96*10^-5 |
8.8*10^-5 |
2.1*10^-4 |
8.3*10^-4 |
1.64*10^-3 |
4.8*10^-3 |
4.8*10^-3 |
| Rotor Inertia |
With brake KG*m2 |
8.73*10^-6 |
3.7*10^-5 |
9.12*10^-5 |
9.17*10^-5 |
2.2*10^-4 |
1.04*10^-3 |
2.05*10^-3 |
/ |
/ |
| Mass (Without Brake) |
Kg |
1.17 |
1.66 |
2.2 |
2.4 |
3.6 |
7.4 |
10.7 |
25 |
32 |
| Mass (With Brake) |
Kg |
1.36 |
2 |
2.8 |
2.96 |
4.2 |
8.7 |
12 |
/ |
/ |
| Motor Poles |
Pole |
10 |
16 |
16 |
16 |
16 |
16 |
16 |
20 |
20 |
| Diameter & Length (With/Without Brake) |
mm |
63mmX83mm
63mmx99.7mm |
ø74mmX91.5mm
ø74mmX109.5mm |
ø88mmX98mm
ø88mmX122mm |
ø88mmX101mm
ø88mmX125mm |
ø110mmX109mm
ø110mmX130.5mm |
ø142mmX138.7mm
ø142mmX164.2mm |
ø170mmX150.7mm
ø170mmX175.7mm |
ø214mmX196mm |
ø240mmX216mm
ø240mmX249.4mm |
| Hollow Shaft Diameter |
mm |
ø10mm |
ø9mm |
ø13.5mm |
ø16.5mm |
ø17mm |
ø29mm |
ø40mm |
ø40mm |
ø50mm |
| Notes |
For reference only, please get in touch with sales for actual parameters |
Only logged in customers who have purchased this product may leave a review.
Shipping Policy
Fast Delivery! We ship via USPS, UPS, DHL, or FedEx because they're fast, reliable, and easy to track. We process orders within 24 hours, and delivery may take 4-7 working days, depending on your location. We'll email you the tracking info once we ship your order. We sell in USD.
Tariff: To minimize or avoid high tariffs, we ship from the country where the product is made, such as China, Italy, Taiwan, Canada, or Europe. If applicable, you will pay the tariff in your country before delivery. The total amount of your order does not include a tariff.
Product Support: You don't need to contact the manufacturer for technical support. We'll handle the issue directly and update you until it is resolved.
Ships From: On this product page, check the Ships From: label to see which country the product ships from. We do not ship all of our products from the USA, except for products made in the USA or in stock. We ship most products from regions such as China, Italy, Taiwan, and Europe, as well as other countries. Therefore, the tariff depends on the country of origin, as not all countries charge the same rate. For example, if the US imposes a 30% tariff on goods from China, in contrast, other countries may impose a lower tariff or none at all.
Tariff vs. Shipping Fee: Please don't confuse the shipping fee with the tariff, because they are two separate charges. You pay us a shipping fee for the carrier to deliver your order to your door. You pay the tariff to the customs office, a branch of your government, as an import tax.
Why aren't we adding tariffs to the product's retail price? If all countries imposed the same tariff amount and used the same currency, we would have added that tariff to the product's retail price. Our suppliers and we are not responsible for tariffs. Please shop accordingly.
Shipping Costs: For some products, we calculate shipping fees based on weight and package size. Some items ship with batteries, which require special delivery for safety, resulting in a slightly higher cost. For lower shipping costs on multiple items or bulk orders, please email us the product link, the quantity, your country, state, and ZIP code, so we can help you lower the shipping cost. Thank you.
Attention! We'll email you the tracking number so you can follow your parcel. The shipping company will contact you by phone, text, or email to arrange payment of the tariff on their website. As the customer, you're responsible for responding to their calls, texts, or emails. You can also use the tracking number link we emailed you to contact the shipping company or pay any applicable tariffs online, if you haven't already done so.
Heads Up! We're not responsible if the shipping company returns your parcel to the country of origin due to the unpaid tariff or non-compliance with its requirements. As a result, you will be responsible for the reshipping costs, applicable tariffs, and an additional 20% service fee. We will not accept any excuses for failing to follow up with the shipping company regarding the tariff, and we will not issue a refund.
Please check your SPAM folder! To provide you with delivery information, we will add your email address to the shipping website so you receive delivery notifications until your parcel reaches your shipping address. Please always check your spam folder to ensure you receive emails from Oz Robotics, USPS, UPS, DHL, and FedEx. Please let us know if you don't want us to enter your email on the shipping company website.
Return Policy
5 Hours: If a mistake occurs during purchase, you have 5 hours to request a refund for any reason, including if you don't want to pay the tariff. However, Stripe will not refund you its processing fee if you cancel your order; therefore, we cannot refund it.
All Sales Are Final: After 5 hours, we can't cancel your order with a refund because order cancellations incur multiple transaction processing fees from Stripe and PayPal, additional shipping fees, reverse tariff payments, and paid ads, all of which are costly and time-consuming. For technical issues, we'll assist you in resolving problems and provide a replacement if you can prove that the product has a manufacturing defect.
Exchange Policy: We want you to be happy with your new purchase. However, once you have used the product, we can't issue a refund, but we will offer an exchange for a product with irreversible manufacturing defects or technical issues. If you purchased the wrong product, then you will be responsible for the re-shipping fees and tariffs. If the product is defective, please email us ASAP with photos or a video of the faulty part so we can evaluate the issue before arranging a replacement.
Privacy Policy
Oz Robotics does not collect personal data from customers or visitors; it collects only the data shown on the user profile screen for registered users.
Terms and Conditions
Delivery Date/Time: If the shipping company can't deliver your parcel because you weren't at your delivery address on the scheduled date/time, that is not our fault. If the carrier returned your parcel to the manufacturer from the country where it was shipped, that is outside our control. Therefore, you will be responsible for paying the re-shipping cost and any applicable tariff for any re-shipment request. In such a case, we will not issue a refund.
We know for a fact that some customers place an order then go on vacation. Please note that since Donald Trump ended the $800 de minimis exemption, low-value international shipments no longer enter duty-free. All incoming packages of $800 or less, even for a product costing $1, are now subject to regular country-specific import duties, processing fees, and full customs checks. Therefore, even if you are on vacation, you will need to keep an eye on your emails, phone calls, and text messages to pay the tariff until it is delivered to your shipping address.
Warranty: We cover problems caused by manufacturing defects, not those resulting from faulty repair attempts, misuse, or customer accidents.






Reviews
There are no reviews yet.