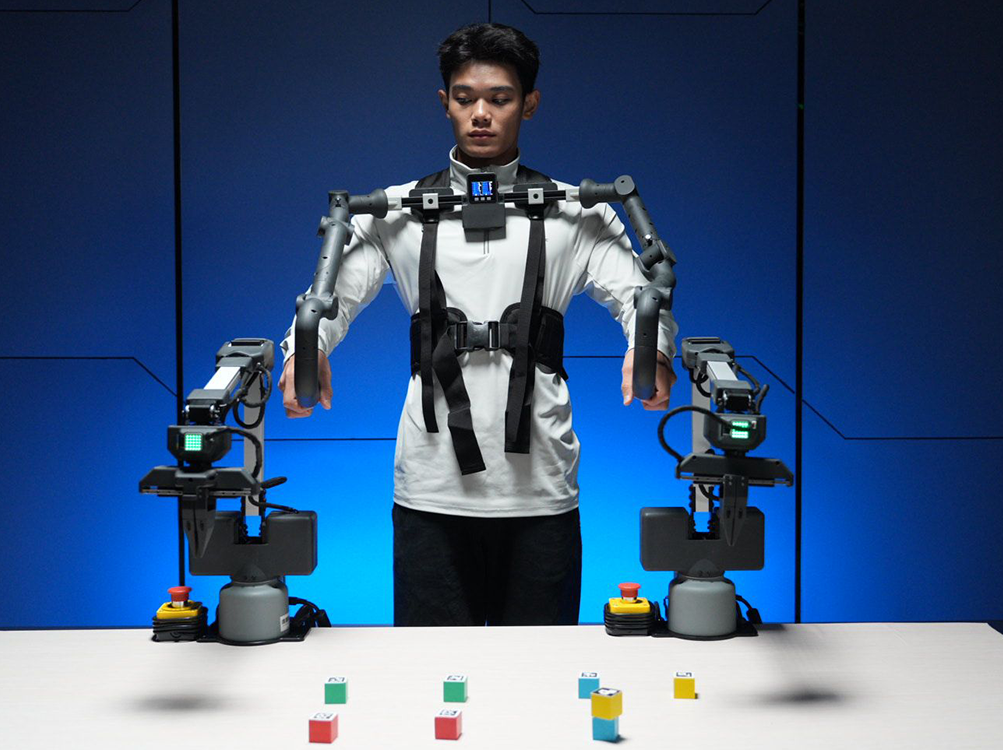
myController S570 Exoskeleton Controller
Research and Development: The S570 captures motion data at 100Hz, ensuring precise AI training and efficient robotic motion capture. Its advanced data processing capabilities are ideal for handling complex research and algorithm development scenarios, providing a solid foundation for innovation.
Education and Training: The S570 works seamlessly with robots of various DOFs, offering a flexible platform for hands-on learning. It enables intuitive robot control, helping students and researchers quickly understand robotics while promoting engaging and
Application Scenarios
Accessible Education


Robotic Teleoperation
With Python libraries and ROS support, the S570 simplifies robot integration for motion data collection and remote control. Its standardized formats and open-source tools make teleoperation easy, even for beginners.
Features
| Name |
myController S570 – Exoskeleton Controller |
| DOF |
12 (6+6) |
| Arm Reach |
570mm per arm |
| Total Span |
1500mm |
| Weight |
1.5kg |
| Power Supply |
8.4V, 2A |
| Rotation Range |
±180° |
| End Actuator |
Dual-finger grip with two buttons and a joystick |
| USB Connection |
Type-C |
| LCD Display |
2.0″ @ 320×240, IPS panel, 853 nits max brightness |
| Data Rate |
Up to 100Hz |
| Main Controller |
ESP32 (Basic), 240MHz dual-core, 600 DMIPS, 520KB SRAM, dual-mode Bluetooth and Wi-Fi |
| Auxiliary Controller |
ESP32 ×2 (Atom), 4MB Flash, 5×5 LED Matrix |
| Interfaces |
Provides access to joint position, speed, acceleration, button status, joystick state, gyroscope data, and customizable LED colors (read/write). |
| File Formats |
Supports 3D-Step and 2D CAD files |
| Current Position |
Read |
| Current Speed |
Read |
| Current Acceleration |
Read |
| Button Status |
Read |
| Joystick State |
Read |
| Gyroscope Data |
Read |
| LED Light Color |
Read/Write |
Only logged in customers who have purchased this product may leave a review.
Shipping Policy
To minimize or avoid tariffs, we ship from the country where the product is made, such as China, Italy, or Taiwan. We sell worldwide in USD.
Fast Delivery! We ship via FedEx, UPS, DHL, and USPS because they're fast, reliable, and easy to track. We process orders within 24 hours, and delivery may take 4-7 working days, depending on your location. We'll email you the tracking number once your order is shipped. We sell in USD.
Shipping Costs: For some industrial products, such as heavy wheels and CNC machines, we calculate shipping costs by weight rather than quantity. To reduce shipping costs for orders with multiple items, please email us at sales@ozrobotics.com before placing your order. We show shipping rates on the product page under the SHIPPING tab. To view the shipping cost for your country, click 'Add to Cart' on the product page.
Return Policy
5 Hours: Mistakes happen when ordering, so you have 5 hours to request a refund for any reason, including if you don’t want to pay the tariff. However, Stripe will not refund you their processing fee if you cancel your order.
All Sales Are Final: After 5 hours, we cannot cancel your order or issue a refund because order cancellations incur multiple transaction processing fees from Stripe and PayPal, additional shipping fees, and reverse tariff payments, which are costly and time-consuming. For technical issues, we will be happy to assist you in resolving problems and provide a replacement if you can prove that the product has a manufacturing defect.
Exchange Policy: We want you to be happy with your new purchase. However, once you have used the product, we cannot issue a refund. However, we will offer an exchange for a product with irreversible manufacturing defects or technical issues. If you purchased the wrong product, then you, as the customer, will be responsible for the re-shipping fees and tariffs. If the product you purchased is defective, email us at support@ozrobotics.com with photos or a video of the faulty parts so we can evaluate the issue before arranging a replacement.
Privacy Policy
Oz Robotics does not collect personal data from customers or visitors; it collects only the data shown on the user profile screen for registered users.
Terms and Conditions
If you were not at home or at your shipping address during the parcel delivery: It is not our or the supplier's fault; if the shipping/delivery company could not deliver your parcel because you, the customer, were not at home or at your delivery address on the delivery date/time, and as a result, the carrier returned your parcel to the manufacturer from where it was shipped. Please note that we do not accept excuses; you will therefore have to pay the re-shipping fee and the tariff for any re-shipment request. In such a case, we will not issue a refund. Please always check your spam folder to ensure you receive emails from Oz Robotics and shipping companies.
Product Warranty: Our warranty covers only product-related problems caused by manufacturing defects. It does not cover problems resulting from faulty repair attempts, customer accidents, or misuse.
Please check your SPAM folder! To provide you with delivery information, we may add your email address to the shipping website so you are notified of delivery until your parcel reaches your shipping address. Please always check your spam folder to ensure our emails from ozrobotics.com and email notifications from DHL, UPS, FedEx, USPS, or other couriers don't land there. Please let us know if you don’t want us to enter your email address on the shipping company website for event notifications.






Reviews
There are no reviews yet.