

Benewake Intelligent Traffic System – BITS with TF03 LiDAR Sensor
Traffic light timing programs aim to develop further adaptive signal control technology (ASCT) to adapt programs to real-time traffic demands and thus reduce traffic congestion in urban areas. An effective ITS providing real-time information for decision-making algorithms is needed by the ASCT.
Benewake launched the BITS, the Benewake Intelligent Traffic System, to provide an effective traffic statistic collecting solution, which can effectively and accurately detect multiple types of traffic statistics, such as vehicle model (profile), vehicle speed, and vehicle height.
Based on Benewake’s single-point LiDAR, TF03, BITS consists of two parts: BITS-2A, collecting traffic statistics with two TF03s; BITS-C, the control board used to process data collected by BITS-2A.
Existing solution introduction — Single point LiDAR
This solution is based on the Benewake single-point ToF LiDAR and consists of three parts: the data acquisition unit, using the Benewake single-point long-range LiDAR, TF03; the main control board, used to collect and process LiDAR information and control output results, control LED display screen (can be omitted); mechanical structure, used to install and fix the entire program.
Benewake’s single point LiDAR solution ——BITS
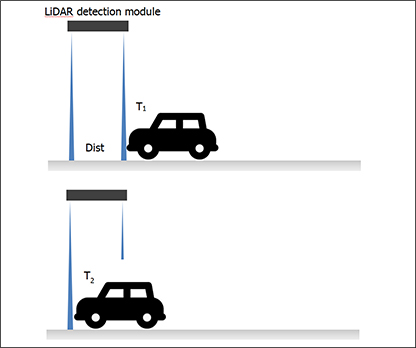
The two LiDARs are installed in the vertical ground direction and the tilt-to-ground (40 °) direction. The tilt LiDAR and the vertical LiDAR can detect the vehicle successively, calculate the trigger time difference between the two, and then calculate the vehicle’s driving speed. In addition, the data measured by the vertical LiDAR can restore the contour information of the vehicle. Finally, a neural network algorithm completes the model recognition.
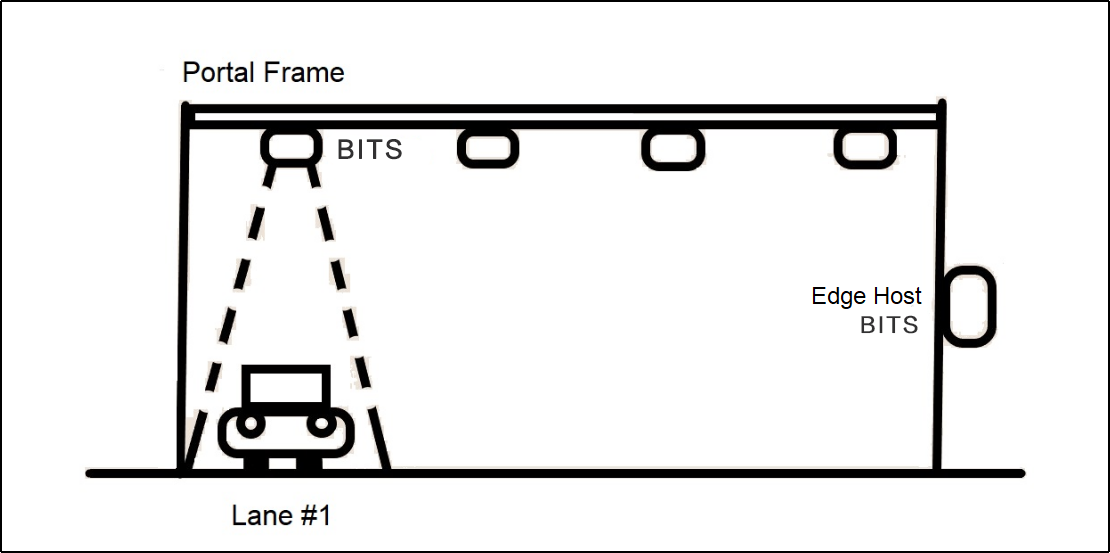
Installation
Vehicle height information can be directly obtained by vertical LiDAR measurement. Next, the two LiDARs calculate the vehicle speed and the trigger time, which calculates the available vehicle speed. Finally, the neural network algorithm matches and identifies the original data collected by LiDAR.
After completing the recognition test, the main control board directly transmits the test results to the customer’s central control system through the data line. Transmission content includes statistics of vehicle models, vehicle height, vehicle length, vehicle speed, and several vehicle models.
