
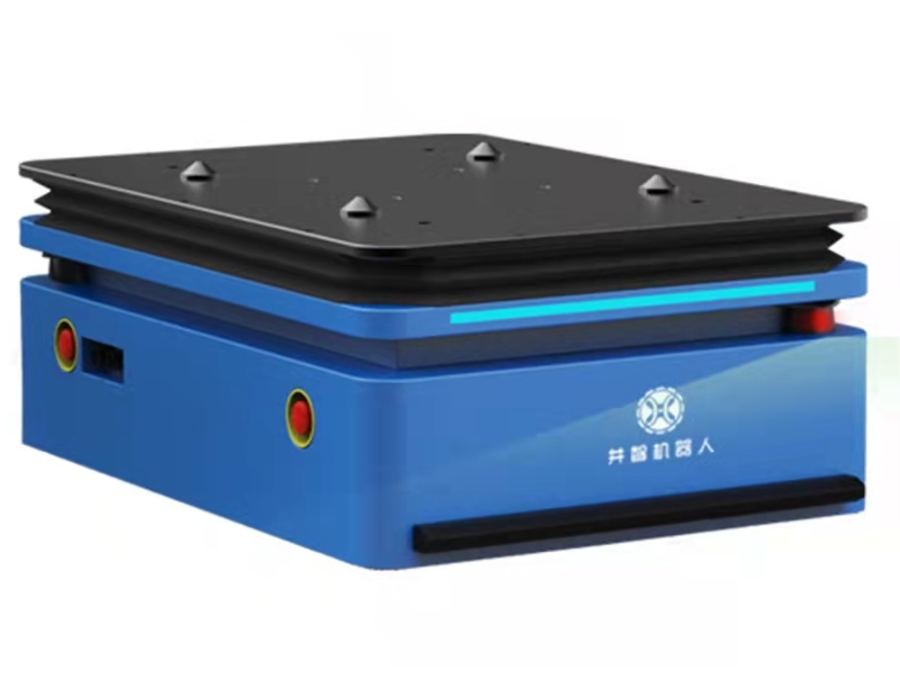
Factory-Made Wellwit Transport Remote Control Engine AMR AGV Robot Wheel / W1000SL
W500SL latent Lifting AGV is a LiDAR SLAM navigation and handling robot independently developed by Wellwit Robotics. It has LiDAR SLAM + inertial navigation, convenient deployment, flexible route, and obstacle avoidance.
- The carrying capacity is 1000kg.
- Intelligent power management: preset multi-level power threshold and charge autonomously if lower than the threshold.
- The product is based on LiDAR SLAM navigation, assisted by inertial navigation, with a navigation accuracy of ± 10 mm.
- Cluster scheduling, in the robot control system, you can view the working status, electricity, location, and other information of all robots simultaneously. Dispatch and manage all equipment through the system.
- Equipped with liDAR to avoid obstacles, front and rear contact anti-collision strips, and left and right emergency stop buttons to protect equipment and goods Safety.

Features
| Basic Specifications | Model | W1000SL |
| Name | Under Drive Lifting Robot | |
| Navigation | LiDAR SLAM | |
| Drive mode | Differential wheel | |
| Length, width, and height | 1278×700×440mm(exclude the bumper) | |
| Maximum payload | 1000kg | |
| Chassis ground clearance | 30mm | |
| Jacking height | 60±2mm | |
| Jacking time | 8±0.5s | |
| Network | Ethernet / Wi-Fi 802.11 a/b/g/n/ac | |
| IP rating[1] | IP 20 | |
| Range of ambient temperature and humidity |
Temperature: 0~50℃ Humidity: 10~90% No compression condensation |
|
| Performance | Pass ability (slope/step/gap)[2] |
≤5%/5mm/30mm |
| Navigation position accuracy[3] | ±5mm | |
| Navigation angle accuracy[3] | ±1° | |
| Operating speed (no-load / full-load) |
1.5m/s | |
| Battery | Battery specifications | 48V30AH Lithium iron phosphate |
| Endurance | Eight h | |
| Charging time(10-80%) | ≤1-2h | |
| Charging mode | Manual/Automatic charging | |
| Battery life | 1500 cycles, capacity ≥ 80% | |
| Security | Laser number | 2 |
| Emergency stop switch | Support | |
| Speaker | Support | |
| Atmosphere light | Support | |
| Bumper strip | Support | |
| Function | Basic functions[4] | Support |
| Wi-Fi roaming | Support | |
| Automatic charging | Support | |
| Shelf recognition | Support | |
| QR code accurate positioning | optional |
- Designed for indoor transport, not recommended for outdoor environments.
- The road surface is smooth, clean, and without significant undulations. Slope 5% = arctan(0.05) ≈ 2.8°. The robot may not stop or turn at ramps, steps, or gaps but only pass quickly perpendicularly.
- Navigation accuracy usually refers to the repeatability of the robot’s navigation to the target site, and the robot can achieve the expected value of repeatability of the robot navigation from a fixed direction to the target site under the condition that the environment scanned by the robot’s LIDAR is relatively stable (change rate < 30%). When the robot runs along the virtual path, it tries to fit the path as closely as possible, but repeatability is not guaranteed. The robot can guarantee to-point accuracy without guaranteeing navigation path-fitting accuracy. The minimum site spacing supported by the robot is 1 cm, so the robot cannot be used as a linear guide.
- The basic functions include map editing, model editing, positioning and navigation, API interface, etc.



Reviews
There are no reviews yet.