
Not Found
The page or the product you are looking for is no longer available. Please see other products: https://ozrobotics.com/shop/
Browse Hottest Products
-

Electric VTOL UAV Fixed-Wing Drone Skyward Studio X2400
$1,020.00 Brand: Xfly-Model
-

Electric VTOL UAV Fixed Wing Drone PNP Skyward Studio X2400
$1,898.00 Brand: Xfly-Model
-

Self-Balancing Electric Stair Climber Dolly with Load Capacity 551 LBS – CT250S
Sale! Original price was: $3,999.00.$3,679.08Current price is: $3,679.08. Brand: XSTO Stair Climbers
-

Stair Climbing Robot Trolley with Loading up to 420 kg of Cargo – CT420SC
Sale! Original price was: $6,999.00.$6,799.00Current price is: $6,799.00. Brand: XSTO Stair Climbers
-

VR Camera for Panoramic Photography
$1,799.00 Brand: Labpano
-

360 VR Camera 8K Pilot One EE 512G
$2,099.00 Brand: Labpano
-

360 Camera Pilot Era the Revolutionary 8K
$2,799.00 Brand: Labpano
-

Electric Stair-Climbing Shopping Cart EzStep
Sale! Original price was: $759.00.$599.00Current price is: $599.00. Brand: XSTO Stair Climbers
-
Shiftout Module – MCS0595-02
$6.40 Brand: TAEJIN Technology
-
Expansion Shield Module for Arduino Nano – MRS1117-01
$13.00 Brand: TAEJIN Technology
-
Audio Amplifier Module LM386 – MAS0386-01
$11.00 Brand: TAEJIN Technology
-

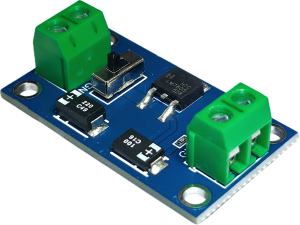
DC-DC Buck Converter Step Down Power Module – MBC2576-02
$10.00 Brand: TAEJIN Technology
-
Display 4-Digit 8-Segment for Raspberry Pi – MCS0595-01
$6.40 Brand: TAEJIN Technology
-
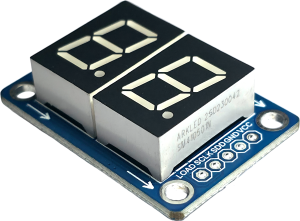
Segment LED Module 2-Digit 7 – LED595-01
$7.00 Brand: TAEJIN Technology
-
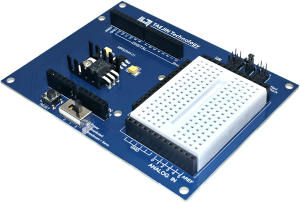
Education Shield Module for Arduino – MRS2940-01
$50.00 Brand: TAEJIN Technology
-
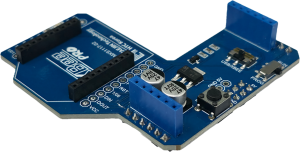
Bluetooth Expansion Shield Compatible with Xbee Module for Arduino – MXS1117-02
$7.20 Brand: TAEJIN Technology
-
Power Supply Regulator LDO Module 5.0V – MLS7805-01
$9.50 Brand: TAEJIN Technology
-

Shield Module RS-485 for Raspberry Pi – MIS0485-03
$7.50 Brand: TAEJIN Technology
-
Shield Module for Arduino RS-232 – MIS0232-01
$12.00 Brand: TAEJIN Technology
-
Buck Converter Step Down Power Module – MBC2596-04
$6.00 Brand: TAEJIN Technology
