Mobile Raspberry Pi-based Robotics Platform – myAGV 2023 PI
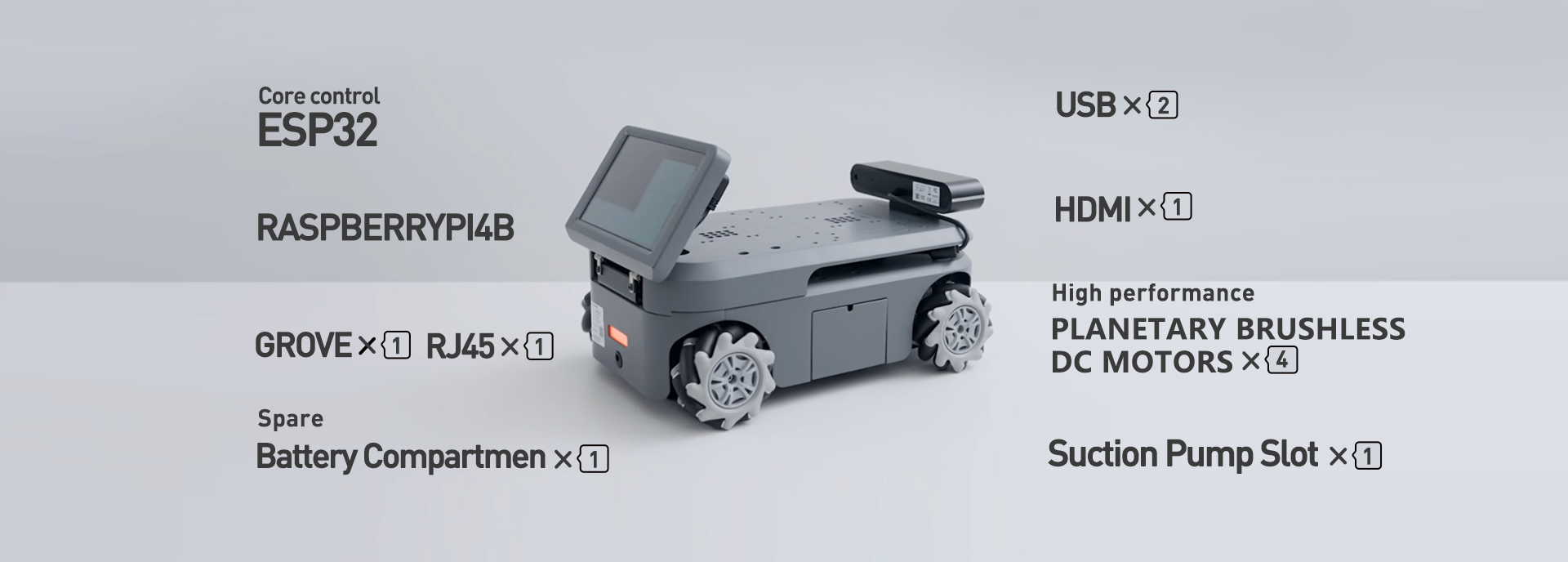
myAGV 2023 PI – Mobile Chassis Autonomous Navigation Raspberry Pi Robot Kit 2D/3D Mapping, Smart 4-Wheel Drive Vehicle with Gamepad. myAGV can be equipped with the myCobot 280Pi robotic arm, the myCobot Vertical Suction Pump V2.0 end effector, and the myCobot Camera Flange 2.0. Using hand-eye calibration algorithms for precise gripping, it provides efficient solutions for research, education, and business applications.

Features and Applications
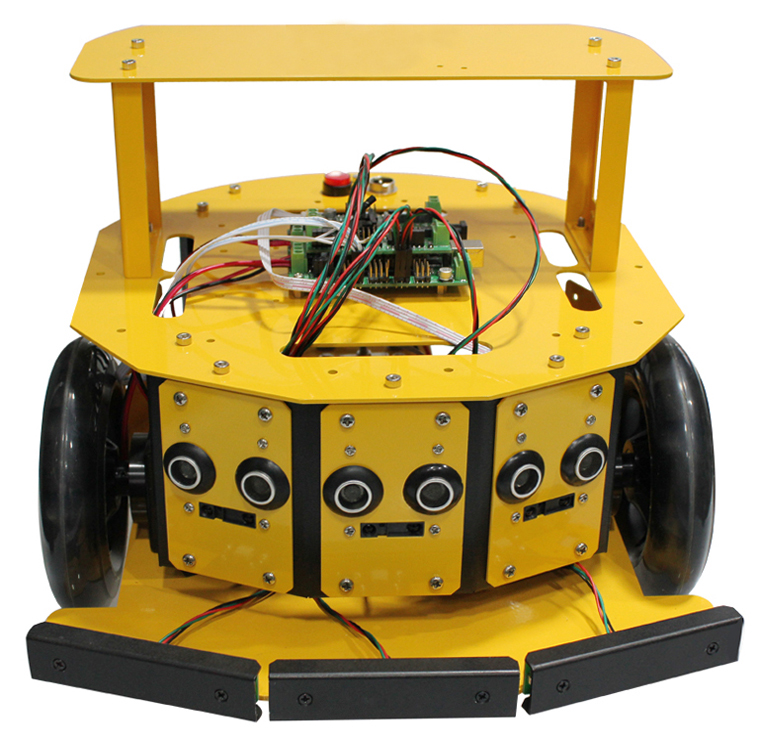
MyAGV PI 2023 is powered by a Raspberry Pi 4B core board, running the customized Ubuntu Mate 20.04 operating system from Elephant Robotics, ensuring a smooth, user-friendly experience. myAGV offers a wide range of features, including 2D and 3D mapping and navigation, graphical programming, visual software, ROS simulation, and gamepad and keyboard control, making it the top choice for research, education, and individual makers.
Education and Research
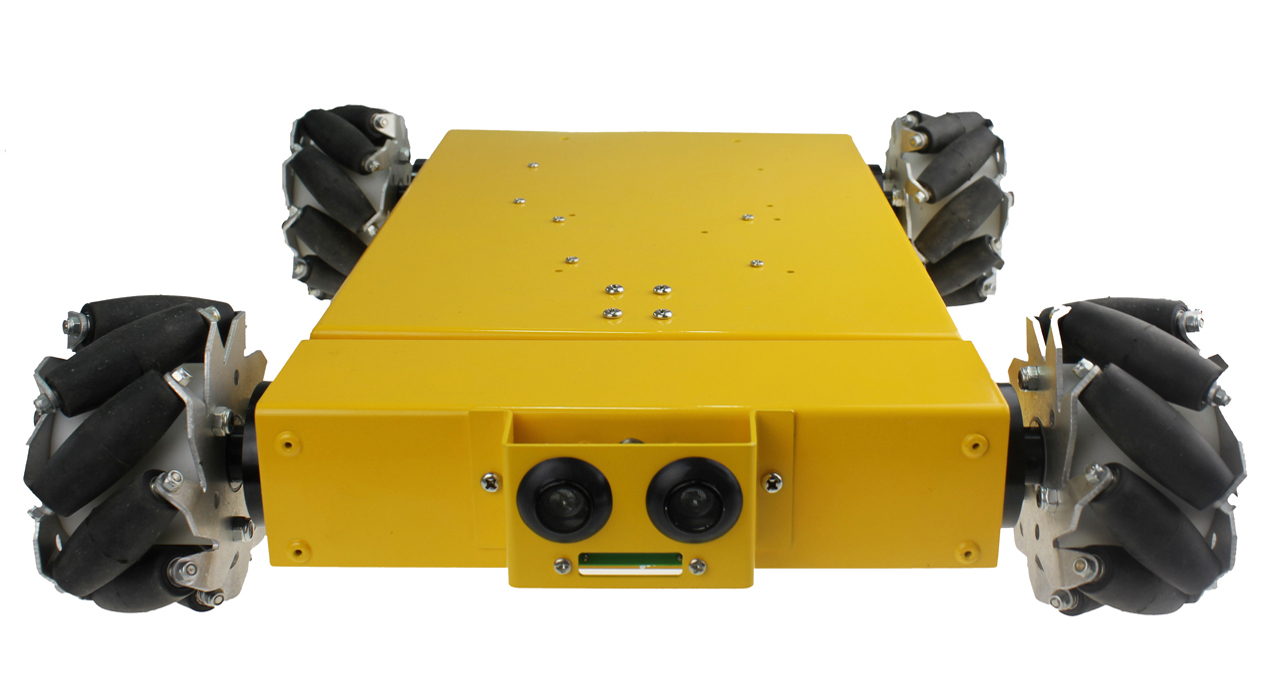
The myAGV 2023 series is equipped with high-performance planetary brushless DC motors, providing increased power for a wider range of more complex applications. This significantly enhances the accuracy of autonomous navigation. Whether in laboratory research or classroom teaching, this chassis offers comprehensive support, helping you explore the unknown and making research and education more flexible.
Innovative Development
The myAGV 2023 series builds on the foundation of myAGV, retaining all its features and adding new functionalities such as 3D navigation, visual software, graphical programming, and various optional accessories. It offers greater user-friendliness and can meet diverse users’ needs for personalized scenario development.
Business Exploration
The myAGV 2023 series can be equipped with our company’s five types of robotic arms. myAGV 2023 + Robotic Arm = Infinite Possibilities. With autonomous navigation, machine vision, and end effectors, it can simulate various business scenarios and meet the application requirements of complex projects. It supports composite robot kits, simulates warehouse logistics and sorting scenarios, and is suitable for business research and demonstrations of composite robot scenarios.
Only logged in customers who have purchased this product may leave a review.
Shipping Policy
Fast Delivery! We ship via USPS, UPS, DHL, or FedEx because they're fast, reliable, and easy to track. We process orders within 24 hours, and delivery may take 4-7 working days, depending on your location. We'll email you the tracking info once we ship your order. We sell in USD.
Shipping Costs: For some products, we calculate shipping costs by weight rather than quantity. To reduce shipping costs for orders with multiple items, please contact us before placing your order.
Tariff: To minimize or avoid high tariffs, we ship from the country where the product is made, such as China, Italy, Taiwan, Canada, or Europe. If applicable, you will pay the tariff in your country before delivery. The total amount of your order does not include a tariff.
Ships From: On this product page, check the Ships From: label to see which country the product ships from. We do not ship all of our products from the USA, except for products made in the USA or in stock. We ship most products from regions such as China, Italy, Taiwan, and Europe, as well as other countries. Therefore, the tariff depends on the country of origin, as not all countries charge the same rate. For example, if the US imposes a 30% tariff on goods from China, in contrast, other countries may impose a lower tariff or none at all.
Tariff vs. Shipping Fee: Please don't confuse the shipping fee with the tariff, because they are two separate charges. You pay us a shipping fee for the carrier to deliver your order to your door. You pay the tariff to the customs office, a branch of your government, as an import tax.
Why aren't we adding tariffs to the product's retail price? If all countries imposed the same tariff amount and used the same currency, we would have added that tariff to the product's retail price. Our suppliers and we are not responsible for tariffs. Please shop accordingly.
Attention! We'll email you the tracking number so you can follow your parcel. The shipping company will contact you by phone, text, or email to arrange payment of the tariff on their website. As the customer, you're responsible for responding to their calls, texts, or emails. You can also use the tracking number link we emailed you to contact the shipping company or pay any applicable tariffs online, if you haven't already done so.
Heads Up! We're not responsible if the shipping company returns your parcel to the country of origin due to the unpaid tariff or non-compliance with its requirements. As a result, you will be responsible for the reshipping costs, applicable tariffs, and an additional 20% service fee. We will not accept any excuses for failing to follow up with the shipping company regarding the tariff, and we will not issue a refund.
Please check your SPAM folder! To provide you with delivery information, we will add your email address to the shipping website so you receive delivery notifications until your parcel reaches your shipping address. Please always check your spam folder to ensure you receive emails from Oz Robotics, USPS, UPS, DHL, and FedEx. Please let us know if you don't want us to enter your email on the shipping company website.
Return Policy
5 Hours: If a mistake occurs during purchase, you have 5 hours to request a refund for any reason, including if you don't want to pay the tariff. However, Stripe will not refund you its processing fee if you cancel your order; therefore, we cannot refund it.
All Sales Are Final: After 5 hours, we can't cancel your order with a refund because order cancellations incur multiple transaction processing fees from Stripe and PayPal, additional shipping fees, reverse tariff payments, and paid ads, all of which are costly and time-consuming. For technical issues, we'll assist you in resolving problems and provide a replacement if you can prove that the product has a manufacturing defect.
Exchange Policy: We want you to be happy with your new purchase. However, once you have used the product, we can't issue a refund, but we will offer an exchange for a product with irreversible manufacturing defects or technical issues. If you purchased the wrong product, then you will be responsible for the re-shipping fees and tariffs. If the product is defective, please email us ASAP with photos or a video of the faulty part so we can evaluate the issue before arranging a replacement.
Privacy Policy
Oz Robotics does not collect personal data from customers or visitors; it collects only the data shown on the user profile screen for registered users.
Terms and Conditions
Delivery Date/Time: If the shipping company can't deliver your parcel because you weren't at your delivery address on the scheduled date/time, that is not our fault. If the carrier returned your parcel to the manufacturer from the country where it was shipped, that is outside our control. Therefore, you will be responsible for paying the re-shipping cost and any applicable tariff for any re-shipment request. In such a case, we will not issue a refund.
Warranty: We cover problems caused by manufacturing defects, not those resulting from faulty repair attempts, misuse, or customer accidents.











Reviews
There are no reviews yet.